This implementation
is specially designed for neuro-evolution since all the weights are represented in a
vector which is then automatically decoded in the evaluate function.
Simple and very useful Kohonen's style Self Organized Maps SOM Neural Networks:
It includes
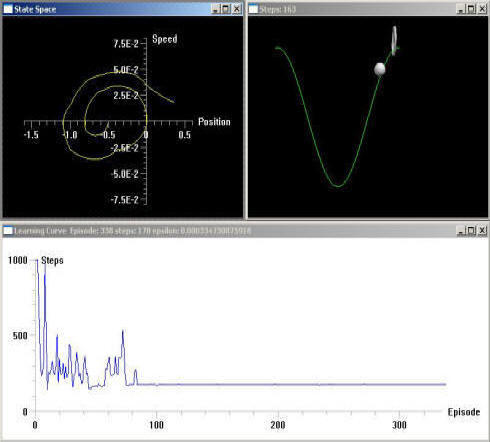
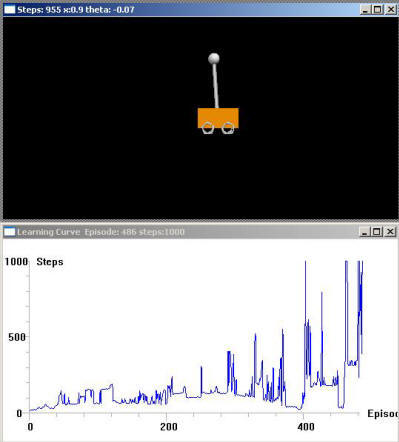
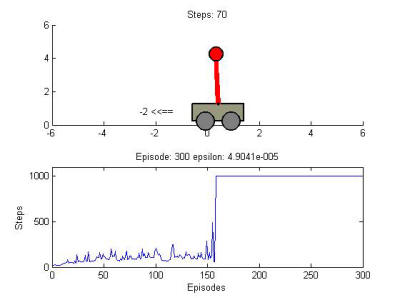
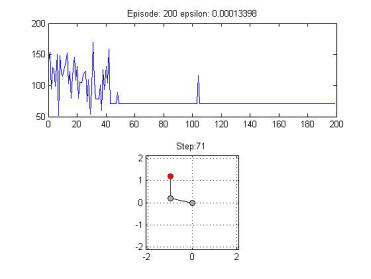
as examples: Acrobot, Mountain Car, discrete and
continuous Cart Pole and a predator/protector/prey game.
You should install
Python+Vpython+Numpy+SciPy
note: these are High Quality/Performance Reinforcement Learning
implementations! do not think they are simple software just because they are
public and free! I used this same software in the
Reinforcement Learning
Competitions and I have won!.
A Reinforcement
Learning Environment in Matlab: (QLearning and SARSA)
Please note that in some versions of Matlab you should delete
some empty parenthesis in order avoid some errors. This should not happen with Matlab release from version 7. This code is a simple implementation of the SARSA
Reinforcement Learning algorithm without eligibility traces, but you can
easily extend it and add more features due to the simplicity
and modularity of this implementation. Enjoy it!
Matlab
SARSA implementation of the Mountain Car Problem
Please note that this is a Matlab implementation, not the
competition one (originally in python), and is made for academic
purposes so it is not optimized for performance or software quality
design. It is just an "easy to understand and easy to try"
implementation. comments are welcome!.
Matlab Ex<a> implementation for the continuous Cart-Pole Problem:
José Antonio Martin H. & Javier de Lope (2009),
"Ex<a> : An Effective Algorithm for Continuous Actions Reinforcement Learning Problems"
, In Proceedings of 35th Annual Conference of the IEEE Industrial Electronics Society (IECON 2009) . Oporto, Portugal. November 2009., pp. 2063 - 2068. IEEE.
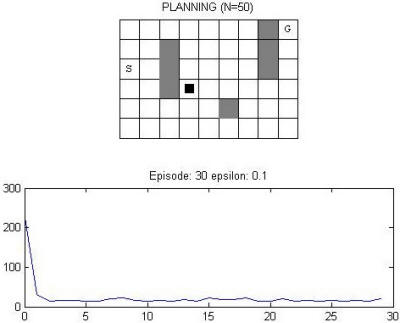
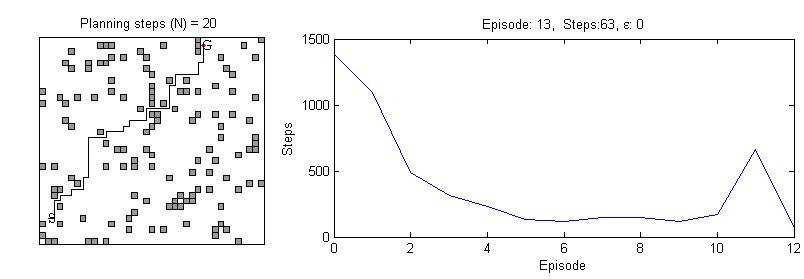
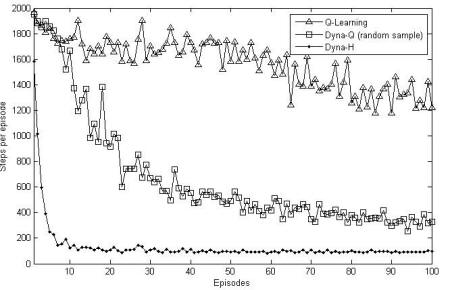
Matilde Santos, José Antonio Martin H., Victoria Lopez: Dyna-H:
a heuristic planning reinforcement learning algorithm applied to
role-playing-game strategy decision systems (2011), Knowledge based systems, Elsevier
A collection of experiments to prove the
hypothesis of the reduction of POMDPs to MDP by means of the use of
Internal Clocks.
I am sorry for not having at this time more theoretical material at hand but you can write me if
you want to talk about or even better, join the rl-list at Google.
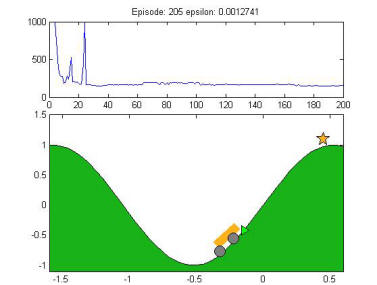
Matlab SARSA Iclock (sarsa plus internal clock) solution to Altered POMDP Mountain Car
Problem:
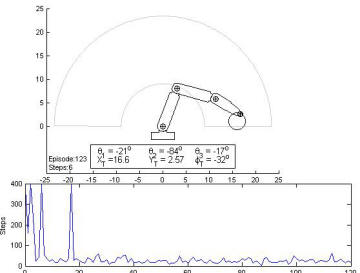
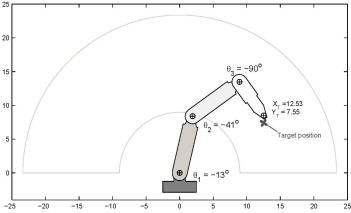
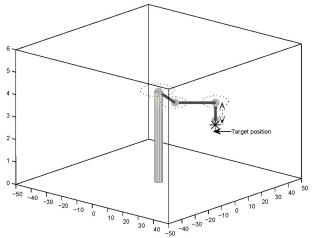
This software is part of a research paper on neuro-evolutionary
methods for multi-link robots, such as the three link planar robot and the
SCARA robot.